Unit 5 - Notes
Unit 5: Multithreading & Synchronization
1. POSIX Thread Creation and Termination
1.1 Overview of Threads
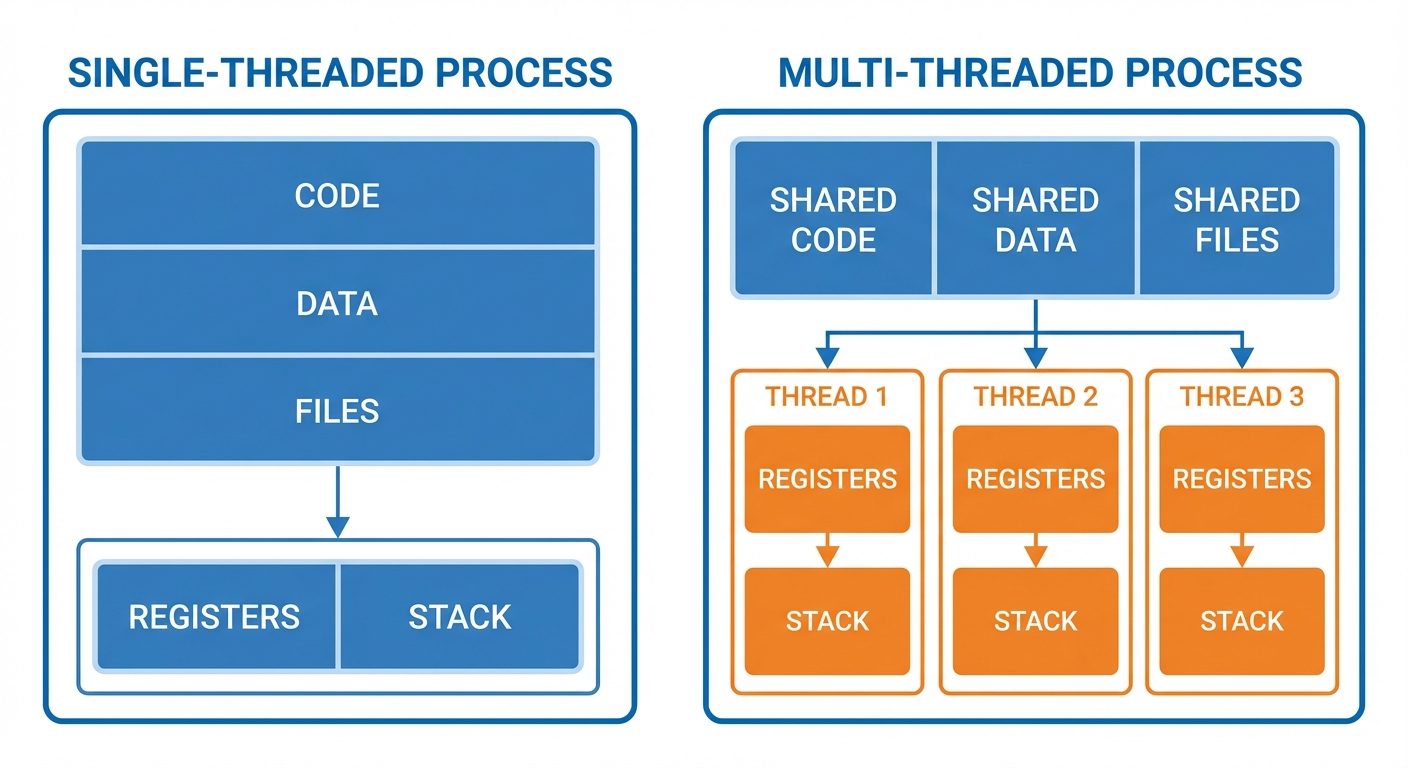
A thread is a basic unit of CPU utilization, consisting of a thread ID, a program counter, a register set, and a stack. It shares the code section, data section, and other operating system resources (such as open files and signals) with other threads belonging to the same process.
- Process vs. Thread: A heavyweight process has a single thread of control. A multithreaded process contains multiple threads of control within the same address space.
- Benefits: Responsiveness, resource sharing, economy (cheaper context switches), and scalability on multiprocessor architectures.
1.2 The Pthreads API
POSIX Threads (Pthreads) is a standard for threading defined by IEEE 1003.1c. In C/C++, headers are found in <pthread.h>. When compiling on Linux, the -pthread flag is typically required (e.g., gcc main.c -pthread).
1.3 Key Functions
1. Thread Creation
To create a new thread, use pthread_create.
int pthread_create(pthread_t *thread,
const pthread_attr_t *attr,
void *(*start_routine) (void *),
void *arg);
- thread: Pointer to a
pthread_tvariable that will store the unique ID of the new thread. - attr: Attributes for the thread (stack size, scheduling policy). Pass
NULLfor default attributes. - start_routine: The function the thread will execute once created. It must return
void*and take a singlevoid*argument. - arg: The argument passed to
start_routine.
2. Thread Termination
A thread terminates when:
- It returns from its start routine.
- It calls
pthread_exit. - It is canceled by another thread (
pthread_cancel).
void pthread_exit(void *retval);
- retval: The return value provided to any thread waiting on this thread via
pthread_join.
3. Thread Join
The pthread_join function waits for a specific thread to terminate (similar to wait() for processes).
int pthread_join(pthread_t thread, void **retval);
1.4 Code Example: Basic Thread Creation
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
void *print_message(void *ptr) {
char *message = (char *) ptr;
printf("%s \n", message);
pthread_exit(NULL);
}
int main() {
pthread_t thread1, thread2;
char *message1 = "Thread 1: Hello";
char *message2 = "Thread 2: World";
// Create threads
pthread_create(&thread1, NULL, print_message, (void*) message1);
pthread_create(&thread2, NULL, print_message, (void*) message2);
// Wait for threads to finish
pthread_join(thread1, NULL);
pthread_join(thread2, NULL);
printf("Main thread: All threads completed.\n");
return 0;
}
2. Race Conditions and Critical Sections
2.1 Race Conditions
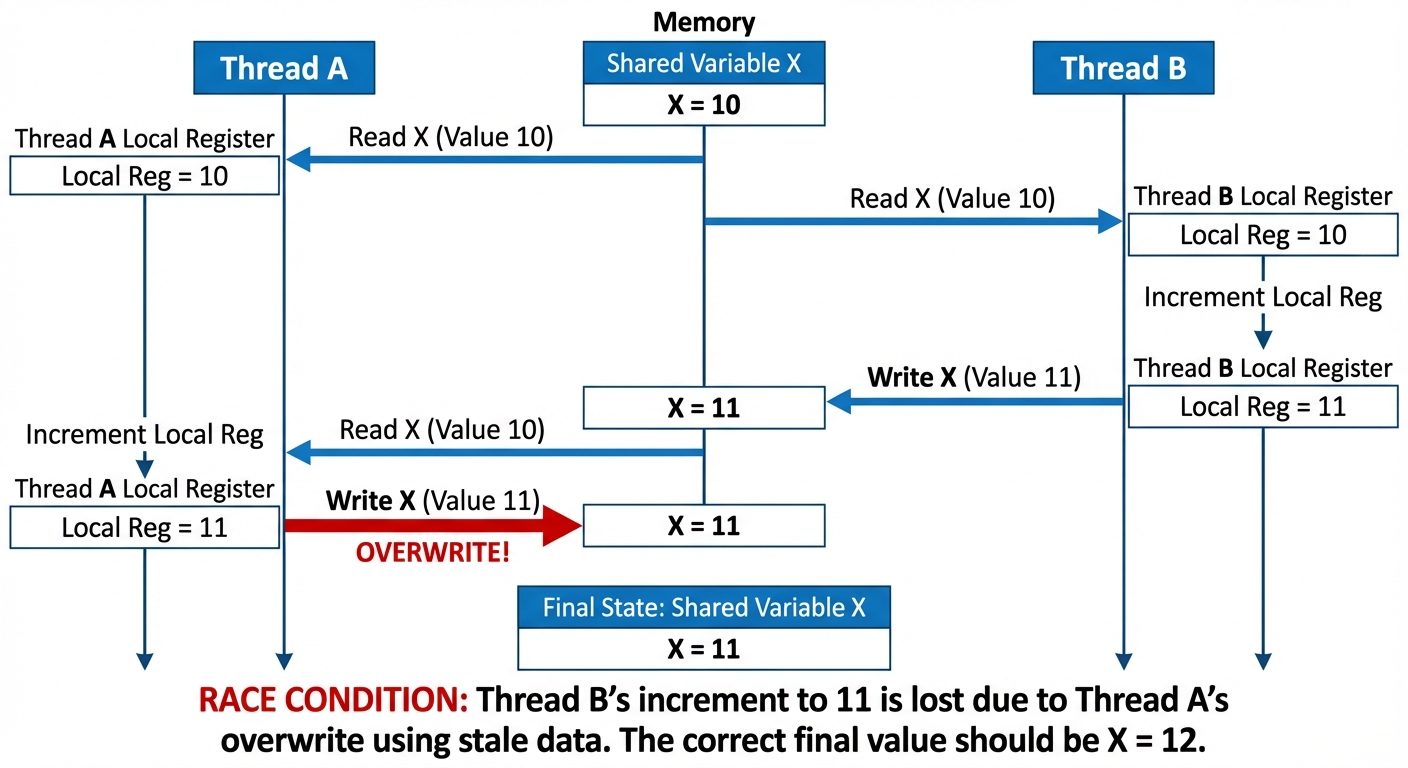
A Race Condition occurs when two or more threads access shared data concurrently, and at least one of the accesses is a write operation. The final result of the data depends on the precise, non-deterministic timing (interleaving) of the thread execution.
Example Scenario:
Two threads try to increment a shared counter count initialized to 0.
- Thread A reads
count(0). - Context Switch occurs.
- Thread B reads
count(0). - Thread B increments and writes back (1).
- Context Switch back to A.
- Thread A (still thinking
countis 0) increments and writes back (1).- Result:
countis 1, but it should be 2.
- Result:
2.2 Critical Sections
The segment of code where a thread accesses shared resources (common variables, files, tables) is called a Critical Section.
To prevent race conditions, we must ensure Mutual Exclusion: If one thread is executing in its critical section, no other thread can be executing in their corresponding critical sections.
Requirements for a Solution:
- Mutual Exclusion: Only one thread in the critical section at a time.
- Progress: If no thread is in the critical section, and some wish to enter, the selection of who enters next cannot be postponed indefinitely.
- Bounded Waiting: There must be a limit on how many times other threads can enter the critical section after a thread has requested to enter.
3. Mutex Locks (Mutual Exclusion)
3.1 Concept
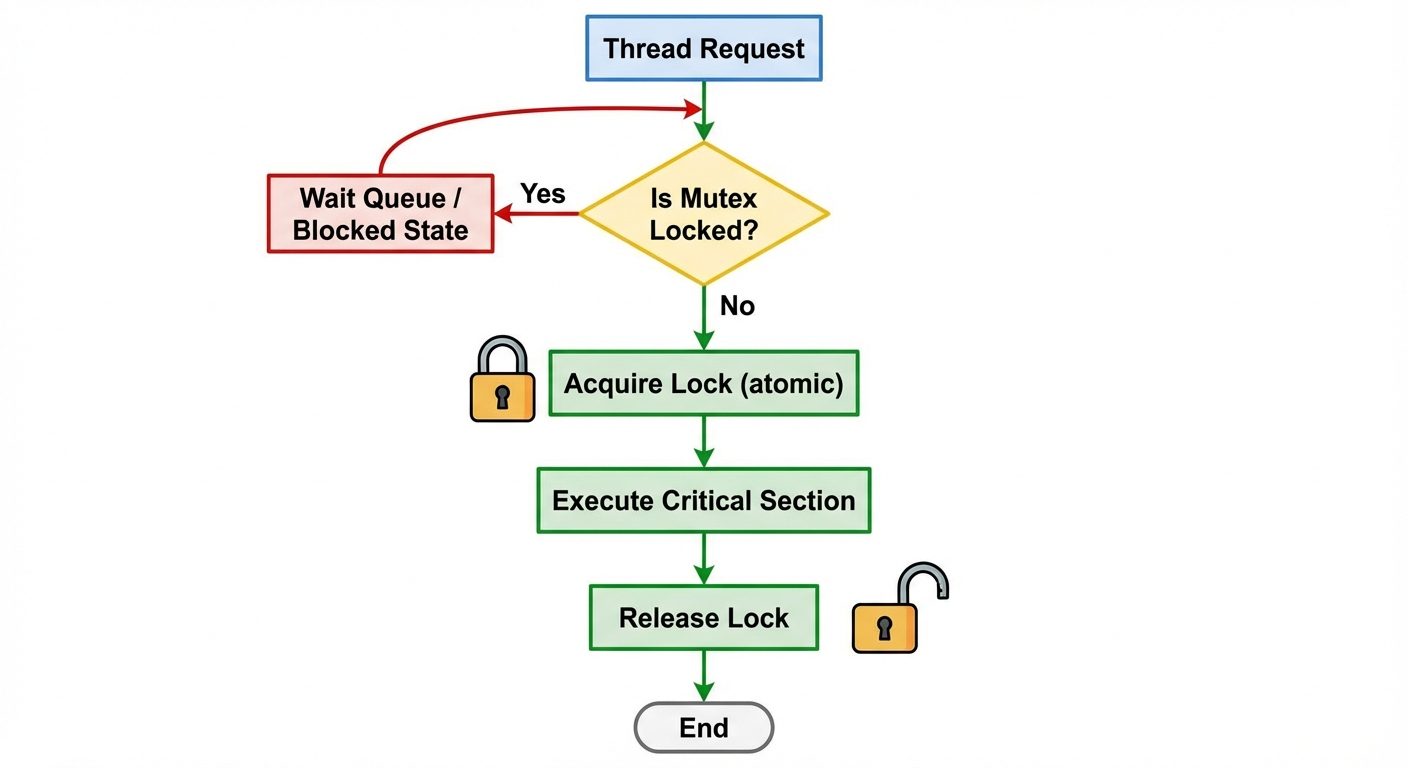
A Mutex (Mutual Exclusion Object) is a synchronization primitive that acts like a lock. It protects critical sections by ensuring that only the thread holding the lock can execute the code.
- Acquire (Lock): Before entering the critical section, a thread must acquire the lock. If the lock is already held, the thread blocks (sleeps) until it is released.
- Release (Unlock): After finishing the critical section, the thread releases the lock.
3.2 Pthread Mutex API
- Initialization:
Cpthread_mutex_t lock; pthread_mutex_init(&lock, NULL); // Or statically: pthread_mutex_t lock = PTHREAD_MUTEX_INITIALIZER; - Locking:
Cpthread_mutex_lock(&lock); - Unlocking:
Cpthread_mutex_unlock(&lock); - Destruction:
Cpthread_mutex_destroy(&lock);
3.3 Code Example: Thread-Safe Counter
#include <stdio.h>
#include <pthread.h>
long shared_counter = 0;
pthread_mutex_t lock; // Mutex declaration
void *increment_counter(void *arg) {
for (int i = 0; i < 100000; i++) {
// Entry Section
pthread_mutex_lock(&lock);
// Critical Section
shared_counter++;
// Exit Section
pthread_mutex_unlock(&lock);
}
return NULL;
}
int main() {
pthread_t t1, t2;
pthread_mutex_init(&lock, NULL); // Initialize mutex
pthread_create(&t1, NULL, increment_counter, NULL);
pthread_create(&t2, NULL, increment_counter, NULL);
pthread_join(t1, NULL);
pthread_join(t2, NULL);
printf("Final Counter Value: %ld\n", shared_counter);
pthread_mutex_destroy(&lock); // Clean up
return 0;
}
4. Semaphores
4.1 Concept
A Semaphore is a more robust synchronization tool than a mutex. It is an integer variable that, apart from initialization, is accessed only through two standard atomic operations: wait() and signal() (historically P and V).
- Wait (
sem_wait/ P): Decrements the semaphore value. If the value becomes negative, the process/thread blocks. - Signal (
sem_post/ V): Increments the semaphore value. If there are blocked processes, one is woken up.
4.2 Types of Semaphores
- Binary Semaphore: Value ranges between 0 and 1. Functionally equivalent to a Mutex lock.
- Counting Semaphore: Value can range over an unrestricted domain. Used to control access to a resource that has a finite number of instances (e.g., a pool of 5 connections).
4.3 Pthread Semaphore API
Header: <semaphore.h>
- Initialization:
C// sem: pointer to semaphore variable // pshared: 0 = shared between threads, non-zero = shared between processes // value: initial value int sem_init(sem_t *sem, int pshared, unsigned int value); - Wait (Decrement/Lock):
Cint sem_wait(sem_t *sem); - Signal (Increment/Unlock):
Cint sem_post(sem_t *sem); - Destruction:
Cint sem_destroy(sem_t *sem);
4.4 Code Example: Signaling (Strict Order)
Semaphores are excellent for imposing an order on operations (Signal/Wait), not just mutual exclusion. Below, we ensure T1 prints before T2.
#include <stdio.h>
#include <pthread.h>
#include <semaphore.h>
sem_t sem;
void* t1_func(void* arg) {
printf("Thread 1: Executing first part...\n");
// Signal Thread 2 that it can proceed
sem_post(&sem);
return NULL;
}
void* t2_func(void* arg) {
// Wait for signal from Thread 1
sem_wait(&sem);
printf("Thread 2: Executing second part (after T1 signal)\n");
return NULL;
}
int main() {
// Initialize semaphore to 0 (locked initially)
sem_init(&sem, 0, 0);
pthread_t t1, t2;
pthread_create(&t1, NULL, t1_func, NULL);
pthread_create(&t2, NULL, t2_func, NULL);
pthread_join(t1, NULL);
pthread_join(t2, NULL);
sem_destroy(&sem);
return 0;
}
Summary Comparison
| Feature | Mutex | Semaphore |
|---|---|---|
| Ownership | Owned by the thread that locks it. Must be unlocked by the same thread. | No ownership. Can be incremented/decremented by any thread. |
| State | Locked / Unlocked. | Integer value (Counter). |
| Primary Use | Mutual Exclusion (protecting a Critical Section). | Signaling and managing resource pools (Producer-Consumer). |
| Speed | Generally faster for simple locking. | Slightly slower due to more complex logic. |